El algoritmo de control y la tendencia de aplicación de la tecnología Fieldbus en el posicionador de válvulas

La válvula de control eléctrico inteligente se usa ampliamente como un actuador de instrumento de automatización importante en el sistema de control de automatización industrial, desempeñando una posición insustituible en las industrias petroquímica, metalúrgica, papelera, etc. No es necesario restablecer manualmente ningún parámetro, lo que puede generar muchas características de flujo ser cambiado.
1. Principio de funcionamiento del posicionador de válvulas
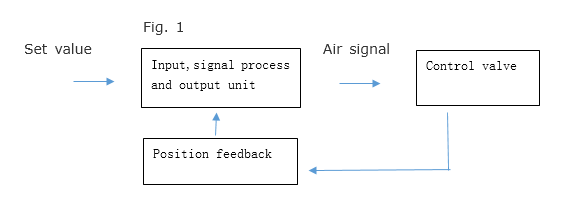
Como uno de los componentes principales de la válvula de control, el posicionador de la válvula juega principalmente un papel importante en el control y la regulación de la válvula. El mecanismo de ajuste es realizar un circuito cerrado de control retroalimentando el movimiento de la posición del vástago de la válvula a la unidad de control del posicionador de la válvula, lo que hace que el control de la posición de la válvula sea más preciso. El principio principal se muestra en la Figura 1:
2. Estado de investigación del algoritmo de control del posicionador de válvulas
Las válvulas se pueden clasificar según diferentes métodos de conducción, que se dividen principalmente en tres tipos, que son válvulas neumáticas, eléctricas e hidráulicas. Donde en la industria la válvula neumática tiene un rango de aplicación más grande de la puerta, porque tiene muchas ventajas, como la estructura de la válvula neumática es relativamente simple y puede prevenir la explosión y el fuego, no requiere un alto uso técnico, la operación es muy fácil y confiable. Este artículo analiza principalmente el posicionador neumático inteligente de válvulas eléctricas, y su algoritmo de control es el siguiente:
(1) Control PID convencional.
El principio del algoritmo de control PID es: la determinación de la cantidad de control está determinada por el resultado del error del sistema y su integración y diferenciación y luego un coeficiente. Este es un algoritmo de control de uso común, pero tiene ciertos defectos, como Para el control del actuador de arranque, debido a sus características no lineales y variables en el tiempo, la precisión del control es baja y no tiene un mejor desempeño dinámico. y robustez.
(2) Control de compensación basado en la observación del estado.
Los actuadores neumáticos tienen deficiencias como no linealidad, variación en el tiempo, histéresis, etc. Además, habrá un cierto espacio y fricción cuando se ejecute el actuador neumático, lo que tendrá un cierto impacto en el efecto de control. Al observar el estado del actuador neumático, compénselo a través de ciertos medios, como el método de compensación de fricción para compensar las características de histéresis de los actuadores neumáticos, que pueden lograr buenos efectos de control.
(3) Control predictivo.
Algunos procesos de producción industrial son más complicados y difíciles de describir utilizando modelos matemáticos precisos. En este caso, se pueden utilizar algoritmos de control predictivo para controlarlos. En la actualidad, los algoritmos de control predictivo se aplican a los sistemas de control utilizados en procesos de producción industrial como energía eléctrica, petróleo y maquinaria. Existen muchos modelos de algoritmos de predicción, entre los que se encuentran los modelos de predicción de actuadores neumáticos basados en inferencia difusa. El algoritmo de predicción también tiene algunas deficiencias, que se reflejan principalmente en su baja precisión de control y el método anti-ajuste relativamente simple en la retroalimentación de control.
(4) Control de modo deslizante.
El algoritmo de control de modo deslizante crea un algoritmo de control no lineal discontinuo con ciertas características robustas. Su proceso de control es un proceso de conversión continua de diferentes lógicas de control. Sin embargo, cuando se utiliza este algoritmo de control para controlar un actuador neumático, tiene una cierta inercia y retardo de tiempo, lo que conducirá a la supresión de la vibración. (Ver tabla 1)

3. la tendencia de aplicación de la tecnología de bus de campo en posicionadores de válvulas
El desarrollo de la tecnología de bus de campo ha promovido el progreso continuo del posicionador de válvula inteligente, que ha desencadenado la revolución del sistema de control del posicionador de válvula inteligente. A diferencia de la forma de control tradicional, integra módulos de control, módulos de E / S y otros módulos funcionales en el equipo de campo inteligente. El posicionador, el actuador, el instrumento de medición, etc.están conectados entre sí a través de un cable de comunicación para formar una red de bus de campo, lo que mejora en gran medida la puntualidad del control del sistema de control inteligente y también puede realizarse un control más descentralizado de diferentes equipos. Los dispositivos de campo del sistema de control de bus de campo y los estándares de bus requeridos deben cumplirse para lograr la correspondencia de la transmisión de señales. La base del desarrollo del bus de campo es el rápido desarrollo de instrumentos inteligentes. Ahora hay muchos tipos de bus de campo, incluidos HART, PROTIBUS, Foundation fieldbus, etc.
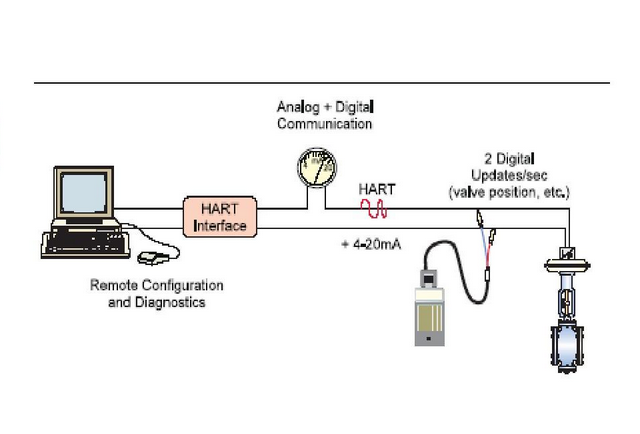
HART es una solución técnica de bus de campo compatible, que puede aprovechar las ventajas del servicio de bus y es compatible con el sistema de 4-20 mA existente. El protocolo que sigue es el protocolo HART, que es un protocolo de transición. Por tanto, el proceso de conversión de sistemas analógicos a digitalización e informatización es compatible. Los instrumentos inteligentes producidos según el protocolo HART se caracterizan por su bajo costo, alta precisión y fácil mantenimiento. Por tanto, se utilizan ampliamente en el mercado y ocupan una cuota de mercado relativamente grande. Se especula que en los próximos 15 a 20 años siempre se utilizará el protocolo HART, por lo que su espacio de aplicación es relativamente amplio. La combinación de bus de campo basado en el protocolo HART y el posicionador de válvula digital inteligente es la tendencia del desarrollo futuro. Sin embargo, debido al inicio tardío del proceso de industrialización en China, no hay suficientes investigaciones sobre posicionadores de válvulas inteligentes, que es relativamente atrasado en comparación con los países occidentales. Por lo tanto, nuestro país debe promover activamente la investigación y producción de productos inteligentes relacionados.